
Gegebene Parameter
| Antriebstyp | |
| Laufwagenführung | |
| Lagerunsgtyp des Laufwagens | |
| Riemenspannart | |
| Ausrichtung der Lineareinheit | |
| Ausrichtung des Laufwagens | |
| Laufwagengöße | |
| Gewicht der Last auf dem Laufwagen | |
| Hub (Verfahrweg) | |
| Verfahrzeit | s |
| Lastrichtung | |
| Lastabstand | |
| Stat. Moment Y-Achse (My) | 0.0 Nm |
| Keine dyn. Moment anwendbar | 0.0 Nm |
| Errechnete Beschleunigung | 0.0 m/s^2 |
| Beschleunigung, falls bekannt | m/s^2 |
| Gesamterforderliche Kraft | 0.0 N |
| Erforderliches Antriebsdrehmoment | 0.0 Nm |
Achse auswählen

gewählte Achse
|
||||||||||||||||||||||||||
Achse
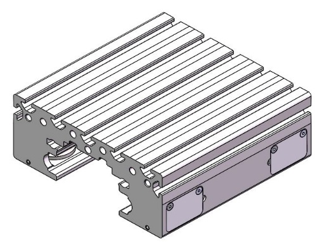
Achse 3D |
||||||||||||||||||||||||||

Riemenantrieb Drehmomentberechnung
Gegeben
| Gewicht der Last auf dem Laufwagen | 0 kg |
| Hub (Verfahrweg) | 0 mm |
| Verfahrzeit | 0 s |
| Bewegungsprofil | |
| Beschleunigung (Vorgegeben) | 000 m/s^2 |
| Beschleunigung (Errechnet) | 000 m/s^2 |
Ergebnis
| Weg bis Vmax | 000 m |
| Zeit bis Vmax | 000 s |
| Vmax | 0.0 m/s |
| ArtNr Umlenkung | 000 |
| ⌀ Umlenkrolle | 000 mm |
| Maximales Anzugsmoment | 000 Nm |
| Errechnete Kraft | 000 N |
| Erforderliches Eingangsdrehmoment | 000 Nm |
Berechnungen Spindelantrieb
Gegebene Werte
| Kritische Länge | |
| Spindeldurchmesser |
Errechnete Drehzahlen
| Kritische Drehzahl | 0 U/min |
| Akzeptable Drehzahl (80%) | 0 U/min |
| Erforderliche Drehzahl | 0.0 U/min |
Errechnetes Drehmoment
| Erforderliches Moment | 0.0 Nm |
Riemenvorspannung
Gegeben
| Umlenkung | - |
| Zahnriemen | - |
| Erforderliche Vorspannung | 0 N |
| Freie Länge des Riemens |
Ergebnis
| erforderliche Frequenz | 0.0 Hz |
Referenzwerte
Die Frequenzen beziehen sich auf die Riemenelänge von einem Meter
| Zahnriemen ArtNr | SL8550 | SL8650 | SL8500 | SL8510 | SL8520 | US0062200 | US0061600 | ||
| Umlenkung | Bezeichnung | AT 3/10 | AT 5/10 | AT 10/22 | AT 10/50 | AT 10/75 | ATL 10/22 | ATL 10/50 | ATL 10/75 |
| SL0540S | 20/20 | 54 Hz | - | - | - | - | - | - | - |
| SL0070S | 40/40 | - | - | 28 Hz | - | - | 27 Hz | - | - |
| SL0720S | 40/40 HD | - | - | 28 Hz | - | - | 27 Hz | - | - |
| SL0690S | 40/80 | - | - | 38 Hz | - | - | 36 Hz | - | - |
| SL0680S | 80/80 | - | - | - | 30 Hz | - | - | 29 Hz | - |
| SL0682S | 80/100 | - | - | - | 33 Hz | - | - | 32 Hz | - |
| SL0684S | 80/120 | - | - | - | 35 Hz | - | - | 34 Hz | - |
| SL0686S | 80/160 | - | - | - | 42 Hz | - | - | 41 Hz | - |
| SL0688S | 120/120-75 | - | - | - | - | 27 Hz | - | - | 26 Hz |
| SL0710S | 120/120-50 | - | - | - | 31 Hz | - | - | 30 Hz | - |
| SL9850S | 80/90 | - | - | - | 29 Hz | - | - | 28 Hz | - |
| SL9855S | 80/90 | - | - | - | 29 Hz | - | - | 28 Hz | - |
| SL9800S | C 40/57 | 54 Hz | - | - | - | - | - | - | - |
| SL9805S | C 40/100 | - | 37 Hz | - | - | - | - | - | - |
| SL9810S | C 80/100 | - | - | 46 Hz | - | - | 44 Hz | - | - |
| SL9820S | C Omega Drive | - | 60 Hz | - | - | - | - | - | - |
| SL0660N | Gegenumlenkung | - | - | 38 Hz | - | - | - | 36 Hz | - |
| SL0610N | Gegenumlenkung | - | - | - | 33 Hz | - | - | 32 Hz | - |
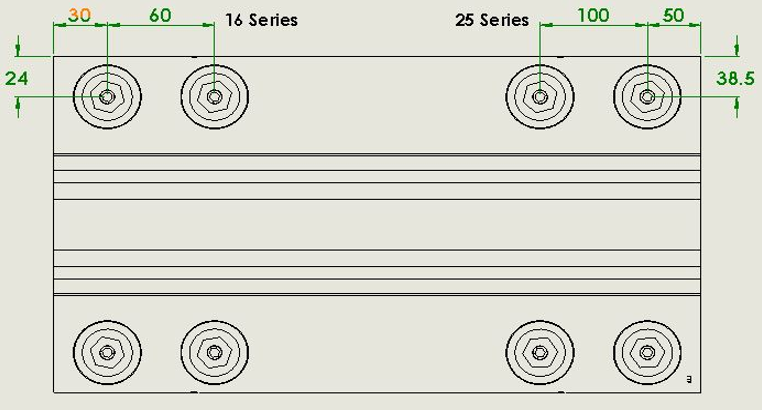
Laufwagenrollenberechnung
Laufwagen Parameter
| Vorausgewählte Baureihe | |
| Laufwagenlänge | mm |
| Laufwagenbreite | mm |
| Fz Max | N |
| Fy Max | N |
| a | mm |
| b | mm |
| c | mm |
Maximale Momente
| Mz Außenrolle | 0.0 Nm | => 4 Rollen |
| Mz Innenrolle | 0.0 Nm | |
| Mz Summe | 0.0 Nm | => 8 Rollen |
|
|
||
| My Außenrolle | 0.0 Nm | => 4Rollen |
| My Innenrolle | 0.0 Nm | |
| My Summe | 0.0 Nm | => 8 Rollen |
|
|
||
| Mx Außenrolle | 0.0 Nm | => 4 Rollen |
| Mx Innenrolle | 0.0 Nm | |
| Mx Summe | 0.0 Nm | => 8 Rollen |
Legende
|
|
Paletti Lineartechnik Tool
Mit diesem Tool geben wir unseren Kunden und Technikern eine Webapplikation zur Hand, um die Auswahl der richtigen Linearachse zu erleichtern. Das Tool errechnet aus den vorgegebenen Parametern des Kunden entsprechend die Belastungen, die auf den Laufwagen auftreten. Es ermittelt entsprechende Momente, die für den Antrieb der Laufwagen erforderlich sind, um dann den passenden Antriebsmotor ermitteln zu können.
Wir übernehmen keine Haftung bei fehlerhaften Berechnungen.
Vorgehensweise zur Ermittlung und Berechnung einer Achse
1. Eingabe der Grundparameter
- Antriebsart
- Ausrichtung der Achse
- Ausrichtung des Laufwagens
- Interner oder externer Antrieb
- geforderte Laufwagengröße - kann offen gelassen werden
- Gewicht der Last auf dem Laufwagen
- geforderter Verfahrweg
- geforderte Verfahrzeit
- Ausrichtung des Lastschwerpunktes zur Ebene des Laufwagens in X, Y oder Z
- Abstand der Lastschwerpunktes zum Mittelpunkt des Laufwagens
- Falls bekannt, kann die Beschleunigung angegeben werden, mit der der Laufwagen maximal beschleunigt werden soll. Wird kein Wert angegeben, so ermittelt das Tool die maximale Beschleunigung über das Bewegungsprofil.
Das Tool berechnet bei Eingabe automatisch die daraus resultierenden Werte und schlägt in der Achsauswahltabelle mögliche Liniearachsen vor.
2. Achsauswahl
Mit einem Klick auf eine Achse wird diese ausgewählt und es werden die restlichen fehlenden Parameter Berechnet und angezeigt.
3. Weitere Berechnungen
Im Nachgang können noch weitere Rechnungen in den anderen Registerkarten durchgeführt werden.
- In der Regsisterkarte Riemenantriebsmomente kann das Bewegungprofil des Laufwagen umgestellt werden. Kräfte und Momente werden entsprechend nachberechnet.
- Bei einem Spindelantrieb kann hier die Drehzahl ermittelt werden, mit der die Spindel maximal drehen darf.
- Für die richtige Spannung des Zahnriemens bei Verwendung eines Riemenantriebes kann hier die Frequenz ermittelt werden, mit der der Zahnriemen vorgespannt werden muss.
- In der Registerkarte Laufrollen können die maximal zulässigen Momente nachgerechnet werden.
Antriebstyp
In diesem Berechnungstool unterscheiden wir zum Zeitpunkt die Antriebsarten Zahnriemenantrieb sowie Spindelantrieb mit der Kugelrollspindel. Die Antriebsform mit Trapezgewindeantrieb ist derzeit nicht implementiert.
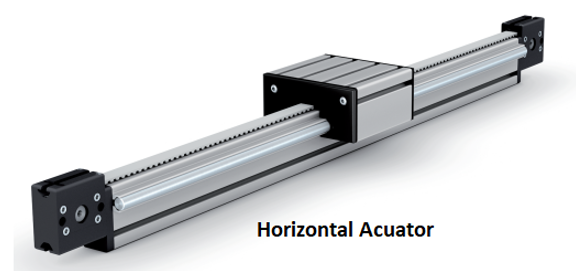
Ausrichtung der Lineareinheit
Das Tool kann bei der Lage der Achse zwischen senkrechter und waagerechter Lage zur Erdoberfläche unterscheiden. Abweichungen hiervon sind eigenverantwortlich zu berechnen.

Ausrichtung des Laufwagens
Das Tool unterscheidet bei der Lage des Laufwagens zwischen horizontaler (draufliegend oder drunterhängend) und der vertikalen Ausrichtung (seitlich) Betriebsart. Beim senkrechten Betrieb der Lineareinheit entfällt eine Berechnung.
Führungsart
Es wird zwischen der internen Führung und der externen Führung unterschieden. Spindelantriebe sind grundsätzlicch intern. Bei den Riemenantrieben bedeutet intern, das der Zahnriemen verdeckt im Führungsprofil geführt wird. Bei externer Führung liegt der Riemen außerhalb des Profils.
Lastrichtung, Lastabstand
Das Tool benötigt Angaben, wo der Schwerpunkt der montierten Last in Bezug auf den Mittelpunkt des Laufwagens liegt. Dazu wird die Richtung in X, Y, oder Z angegeben sowie die Entfernung des Schwerpunktes der Last vom Mittelpunkt des Laufwagens.
Bekannte Beschleunigung
Wird die (maximale) Beschleunigung vorgegeben oder ist diese bekannt, so kann diese hier angegeben werden, um die daraus resultierenden Kräfte und Momente zu berechnen. Wird die Beschleunigung nicht angegeben, so wird aus dem Verfahrweg und der vorgegebenen Zeit für den Verfahrweg die Beschleunigung nach der 1/3 Regel (oder wenn anders eingestellt ist, nach der 1/2 Regel) berechnet. Siehe auch Riemenantriebsmoment
Maximale Beschleunigung
Zu beachten ist: Beschleunigungen über 1.0m/s^2 werden von uns im Normalfall nicht verbaut. Dies hat folgenden Grund: Bei einer Beschleunigung von über 1.0m/s^2 verschleißen die Laufrollen sehr stark, da bei der Beschleunigung die Laufrollen aufgrund ihrer Trägheit im ersten Moment nicht mitdrehen und somit an der Laufschiene schleifen.
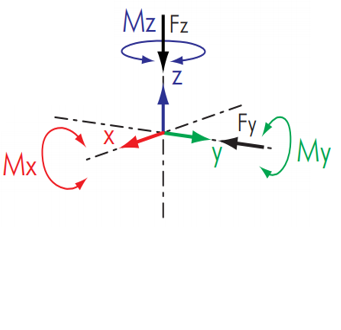
Mx, My, Mz, Fy, Fz
Die Momente und Kräfte sind im Bezug zum Laufwagen definiert. zur Verdeutlichung sind Laufwagen, Momente und Vektoren hier zu sehen:
Bewegungsprofil
Bei der Berechnung gibt es zwei Bewegungsprofile zur Auswahl:
- Trapezförmig
- Dreiecksförmig
Bei trapezförmigem Bewegungsprofil wird die 1/3 Regel angenommen: erste Drittel der Zeit: Beschleunigung, zweite Drittel: gleichförmige maximale Geschindigkeit, dritte Drittel: negative Beschleunigung (Verzögerung).
Bei der dreiecksförmigen Bewegung wird die 1/2 Regel angenommen: erste Hälfte Beschleunigung bis zum Maximum, zweite Hälfte Abbremsen bis zum Stillstand.
Kritische Länge
Unter Last und/oder durch die Schwerkraft biegen sich die Spindeln durch. Die Spindel fängt somit beim Drehen an zu schwingen.
Dieses Tool ermittelt die maximal zulässige Drehzahl in Abhängigkeit der Lasten und der maximal frei schwingenden Achse (kritische Länge) sowie dem geforderten Vorschub. Die akzeptable Drehzahl darf hierbei nicht überschritten werden, um Schäden am Antrieb zu vermeiden.
Spindeldurchmesser
Für gewöhnlich werden Antriebsspindeln mit 20mm Durchmesser verwendet. Als alternative kann auch eine Spindel mit einem Durchmesser von 25mm ausgewählt werden.
Riemenspannung
Für den verschleißarmen Betrieb ist es erforderlich, dass der Zahnriemen mit der richtigen Vorspannung montiert wird. Bei falscher Vorspannung reißt der Riemen oder springt über. Nur mit der richtigen Vorspannung ist gewährleistet, dass der Zahnriemen lange genutzt werden kann.
Die Riemenvorspannung wird mittels Schwingung des Zahnriemens ermittelt. Der Laufwagen wird so eingestellt, dass der Riemen genau 1000mm frei schwingt. Ist der Lineareinheit kürzer, sodass keine 1000mm eingestellt werden können, so kann hier die Frequenz errechnet werden, mit der der Riemen schwingen muss, um die richtige Vorspannung zu erhalten.
Laufrollen
In der Standardausführung werden die Laufwagen mit 4 Laufrollen ausgestattet. Mittels 4 weiterer Laufrollen kann die Belastung weiter erhöht werden.
Das Tool ermittelt entsprechen die maximalen Drehmomente, die auf den Laufwagen wirken dürfen.
Sind abweichend vom Standard andere Positionen der Rollen gewünscht/erforderlich, so können hier die daraus resultierenden Drehmomente, die auf die Rollen wirken, ermittelt werden. Zu beachten ist, dass die Abmessung von der Laufschiene zur Rolle fest vorgegeben ist. Eine Abweichung hiervon würde andere Rollen erfordern.

